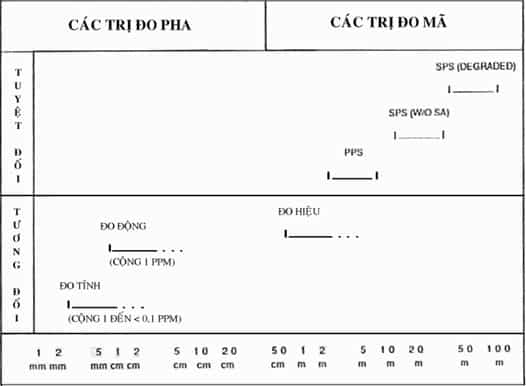
Độ chính xác định vị GPS không những chỉ phụ thuộc vào loại trị đo dùng trong xử lý mà còn phụ thuộc đáng kể vào kiểu định vị
ĐỊNH VỊ TUYỆT ĐỐI
Còn được gọi là định vị điểm đơn. Trong kiểu này các trị đo được dùng là giả cự ly.
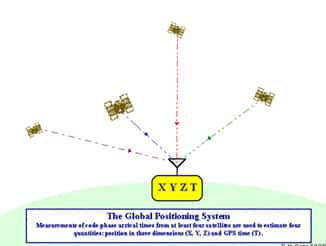
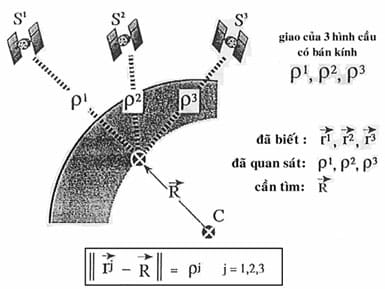
Giả sử toạ độ vệ tinh đã biết ( ), véc tỏ từ máy thu đến vệ tinh đo được là , thì toạ độ của máy thu ( ) có thể xác định được. Tuy nhiên trong thực tế chúng ta không đo được mà chỉ đo được khoảng cách r. Do đó cần ít nhất 3 vệ tinh khác nhau mới giải ra được toạ độ máy thu. Ngoài ra do đồng hồ của máy thu luôn có sai số nên phát sinh thêm một ẩn số nữa và do vậy cần có từ 4 vệ tinh trở lên.
Trị đo giả cự ly chứa nhiều sai số dẫn đến toạ độ của máy thu có thể sai từ vài mét đến vài chục mét.
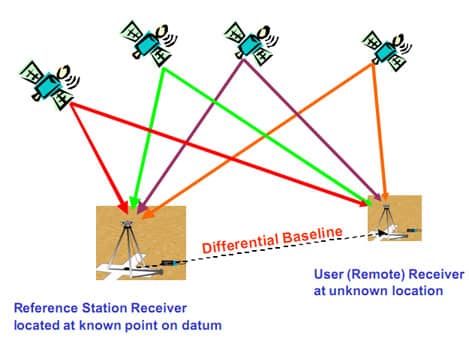
ĐỊNH VỊ TƯƠNG ĐỐI
Hầu hết các nguồn sai số trong trị đo khoảng cách có thể được khủ hoặc giảm đi đáng kể trong trị đo hiệu giữa hai máy thu và/ hoặc hai vệ tinh. Tuy nhiên để làm điều đó cần phải có ít nhất hai máy thu đồng thời quan trắc một số lượng vệ tinh chung. Kết quả xử lý cho ta hiệu tọa độ giữa hai điểm đặt máy thu (còn gọi là baseline vector).
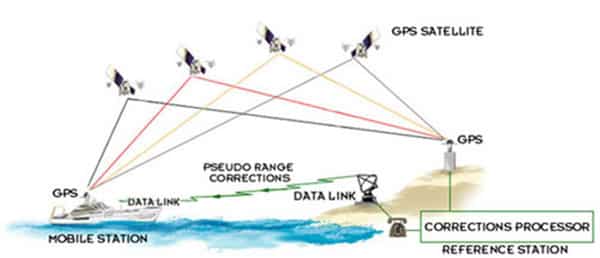
ĐỊNH VỊ ĐỘNG
Nếu trường hợp máy thu không đứng yên mà chuyển động liên tục thì ta gọi đó là định vị động. Định vị động có độ chính xác kém hơn định vị tĩnh (trường hợp máy thu đứng yên) nhưng có rất nhiều ứng dụng trong thực tế như quản lý, điều khiển các đối tượng động tàu, xe, vv… Định vị động cũng có hai kiểu: tuyệt đối và tương đối. Kiểu tương đối được ưa chuộng hơn vì độ chính xác tốt hơn. Trong trường hợp này, một máy thu được đặt cố định tại một điểm đã biết tọa độ (gọi là base receiver hay reference station), máy thu thứ hai gắn trên các đối tượng động (gọi là rove receiver hay mobile station). Nếu trạm tĩnh có trang bị thêm bộ phận phát radio để phát các thông tin (bao gồm vị trí trạm tĩnh và các số hiệu chỉnh khác) về phía trạm động để trạm này giải ra ngay tọa độ của mình thì ta gọi đây là kiểu định vị động thời gian thực (real-time kinematic – RTK).
ĐỊNH CHÍNH XÁC ĐỊNH VỊ GPS
Độ chính xác định vị GPS theo trên phụ thuộc rất nhiều yếu tố. Tuy nhiên nếu chỉ dựa vào kiểu định vị và loại trị đo dùng trong xử lý, ta có thể tóm tắt trong bảng sau :